黑洞资源笔记
- prompts:聚焦教学场景的提示库
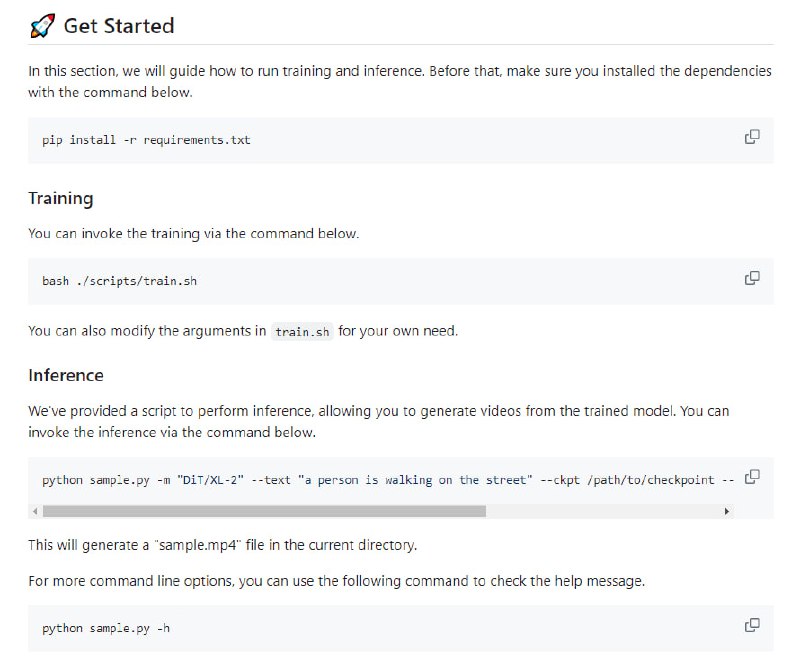
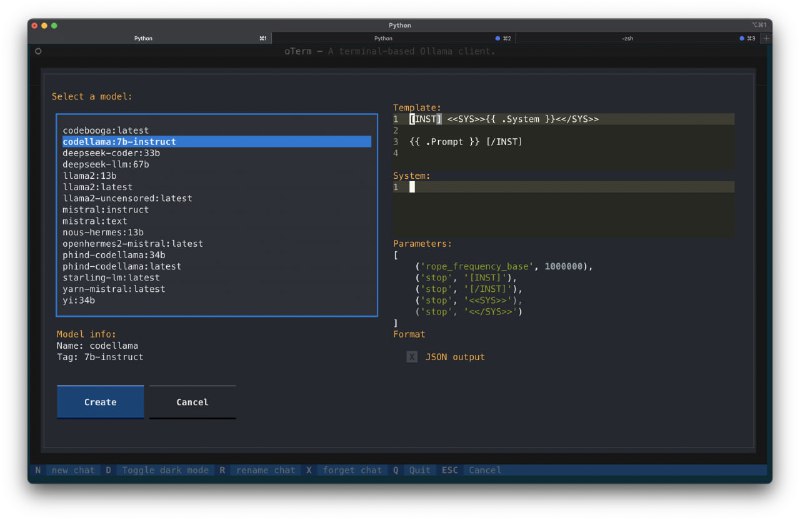
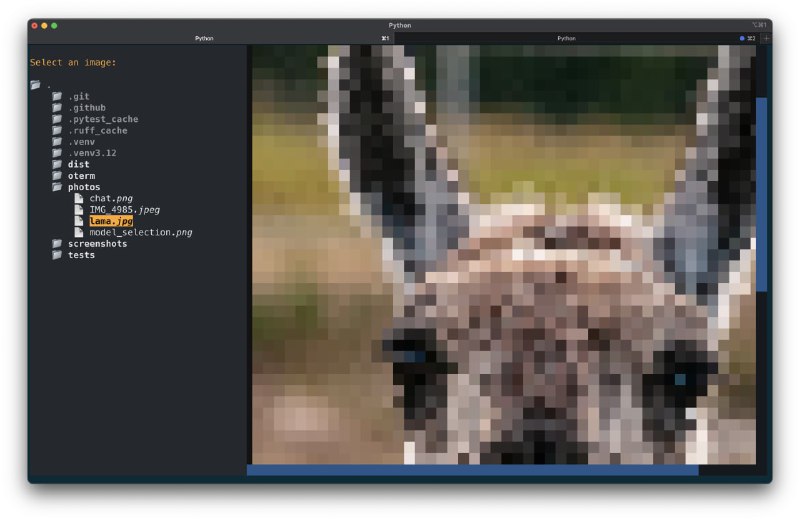
- Open-Sora:打造自己的Sora视频生成模型,提供完整的Sora复制架构解决方案,包括从数据处理到训练和部署的整个过程
-
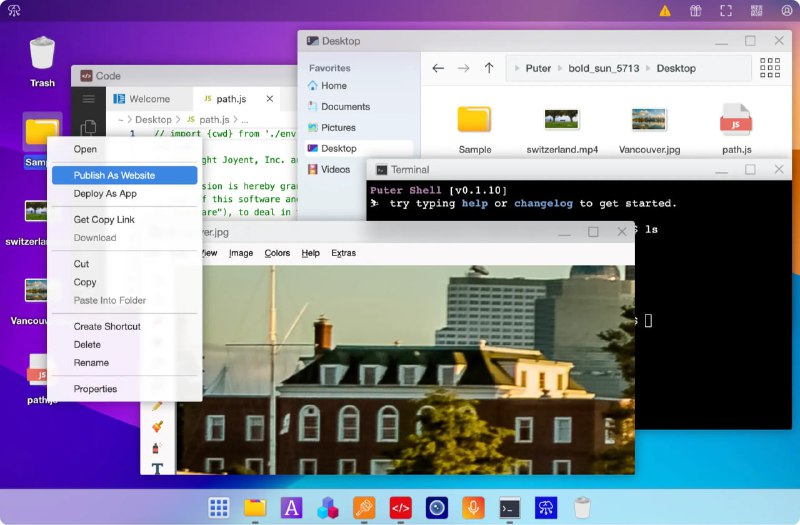
- Puter:浏览器里的桌面环境,旨在功能丰富、异常快速和高度可扩展
-
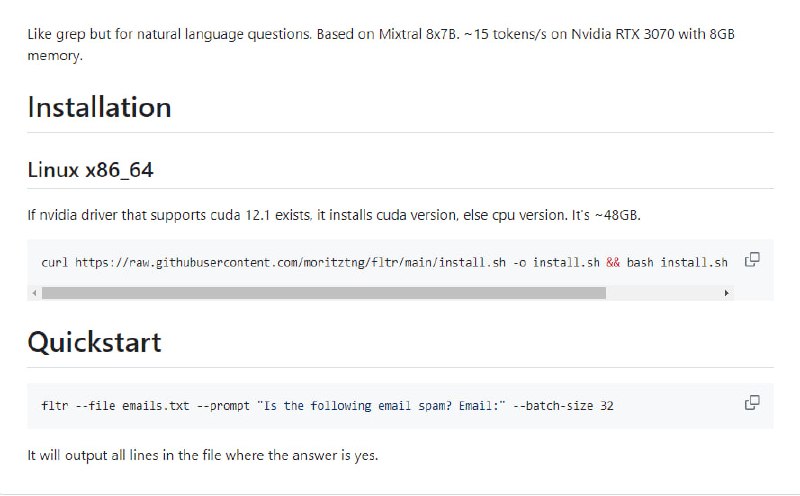
- fltr:提供了类似于grep的功能,但用于处理自然语言问题,基于Mixtral 8x7B模型进行开发,能根据给定的问题,在文本中搜索匹配的结果并返回
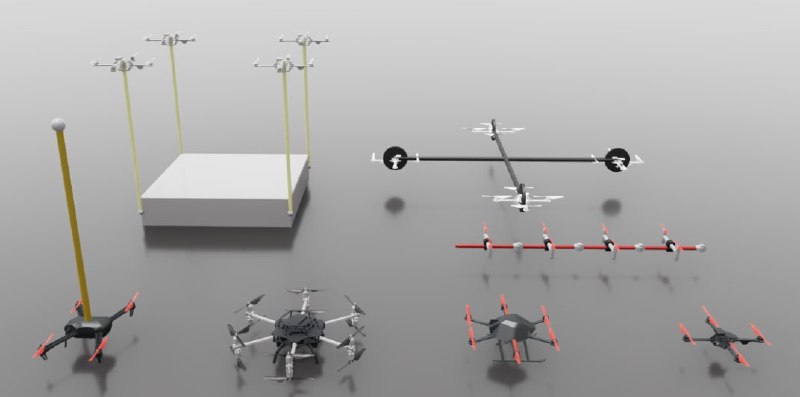
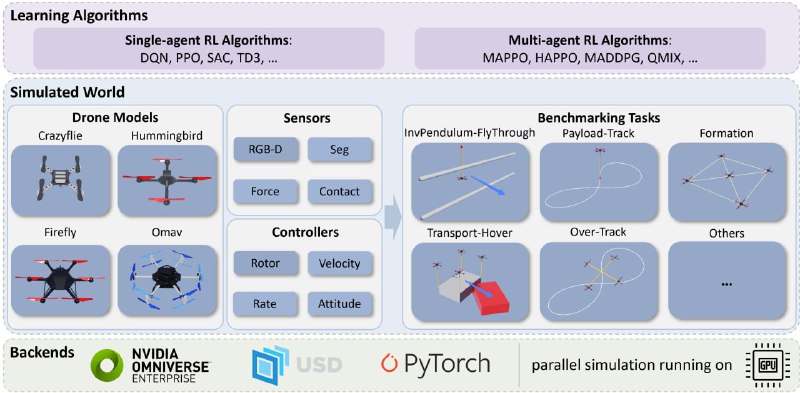
- 一个基于 Nvidia Isaac Gym 的易于使用的强化学习 (RL) 框架,旨在训练人形机器人的运动技能,强调从模拟到现实环境的零样本迁移。Humanoid-Gym还集成了从Isaac Gym到Mujoco的sim-to-sim框架,允许用户在不同的物理模拟中验证训练好的策略,以确保策略的鲁棒性和泛化性。
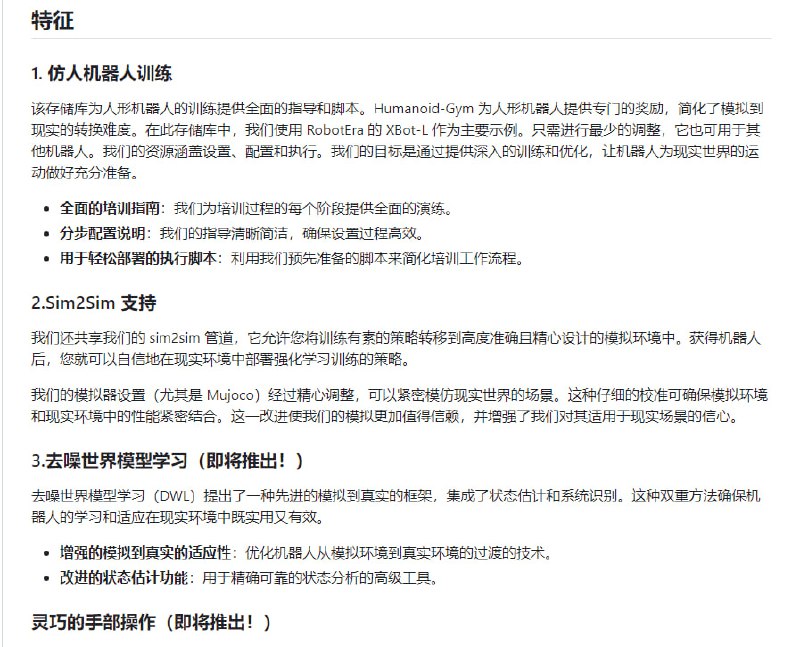
该代码库由 RobotEra 的 XBot-S(1.2 米高的人形机器人)和 XBot-L(1.65 米高的人形机器人)在现实环境中进行了验证,具有零样本模拟到真实的传输。
Humanoid-Gym | #框架 - BAML:用于构建强类型LLM函数的编程语言,包括测试和可观察性功能,BAML是一个轻量的编程语言,可以使用自然语言定义具有结构化输入和输出的AI函数,还提供了VSCode Playground,可以在不离开VSCode的情况下即时测试任何LLM的提示。
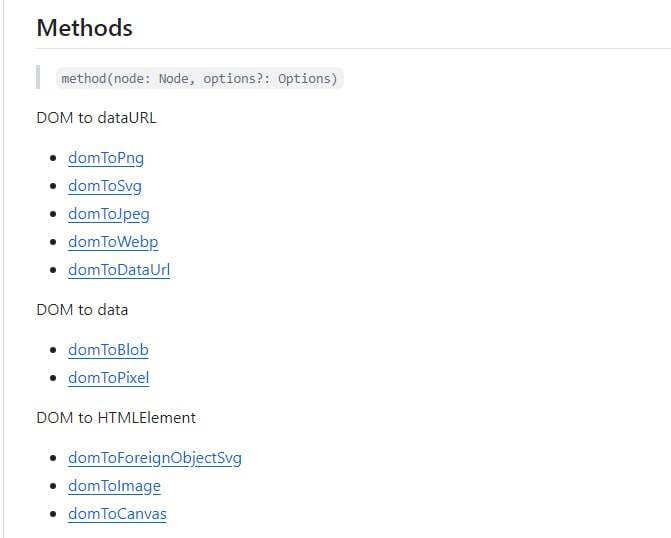
- modern-screenshot:用 HTML5 canvas 和 SVG 从 DOM 节点快速生成图像
-
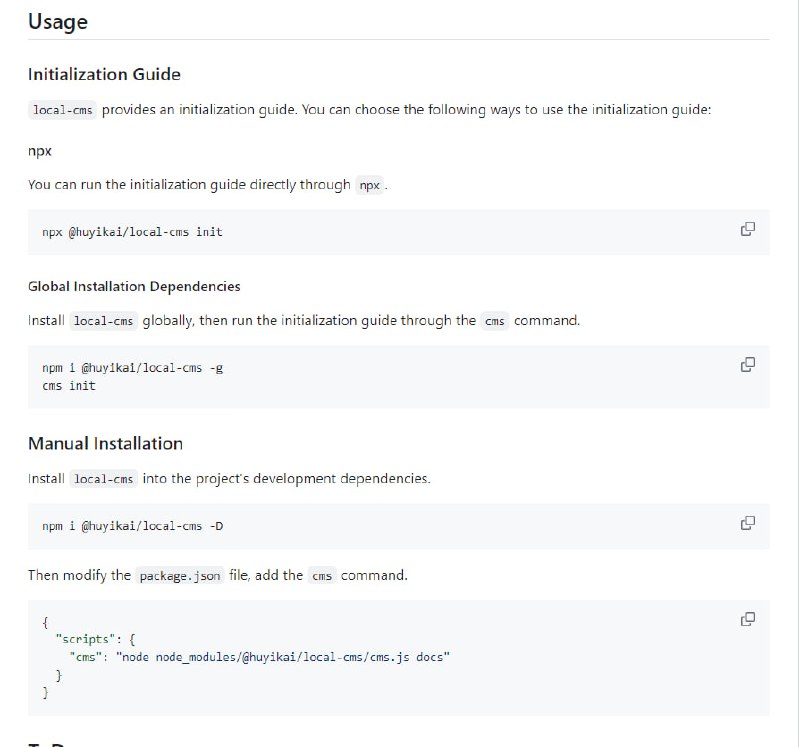
- Local-CMS:用于管理本地Markdown文件的管理系统,提供了命令行界面和编辑实时预览功能,可以实现文件和文件夹的添加、删除、修改和搜索操作,还支持在实时保存的同时进行编辑,并提供了Vitepress主题样式编辑器
- Polaris:高性能的Golang工作流编排器,旨在处理具有多个步骤的工作流执行,其中每个步骤依赖于前一个步骤生成的数据,支持一次性或多次性跨请求范围执行,并且可以将可重用的组件以不同的方式组合以生成不同的结果
-
- 马士兵2024版 C++ 后端开发工程师

-